Eigenvalues and eigenvectors of matrices
Terms:
An eigenvector of a mapping is a vector that is only changed in magnitude but not in direction by the mapping. The factor by which the magnitude changes is the associated eigenvalue. The set of eigenvectors to an eigenvalue is called eigenspace. The set of eigenvalues of an image is the spectrum of the image. The spectral radius is the eigenvalue with the largest amount. The dimension of the eigenspace is the geometric multiplicity of the eigenvalue. The algebraic multiplicity is defined by the multiplicity of zeros of the characteristic polynomial.
Definition:
For a square matrix A, each vector v is an eigenvector if the following condition is met:
The factor λ is the eigenvalue belonging to the eigenvector v. The eigenvalues can be real or complex.
Illustrative interpretation:
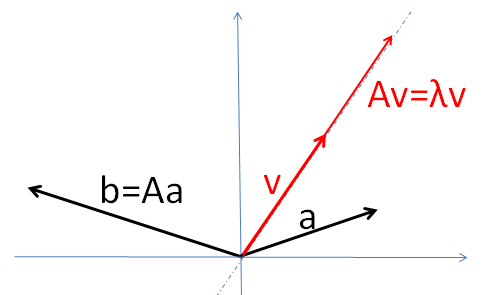
In general, a matrix A maps a vector a into another vector b. The eigenvectors v are distinguished by the fact that they are only stretched or compressed by a factor. In the diagram is the vector v a eigenvector streched by the factor λ. The vector a is not a eigenvector because the matrix changes also the direction.
Two-dimensional example
Using this example, the eigenvalue and eigenvector are explained clearly in the plane.
This matrix maps the vector (1,1) as follows.
This the vector is an eigenvector of A, which is stretched by the factor of 2. Thus, the eigenvalue belongs to the eigenvector (1,1).
For another vector, e.g., (2,3), this is not true.
However, the matrix does not just have one eigenvector. For example, the vector (2,2) is also an eigenvector.
Eigenvalue Calculation
The equation
can be transformed into the homogeneous equation system
The system of equations has a non-trivial solution if and only if the determinant disappears. That if applicable
The polynomial is called the characteristic polynomial of A and the equation is the characteristic equation of A. If λi is an eigenvalue of A then the solutions of the characteristic equation are the eigenvectors of A to the eigenvalue λi.
Two-dimensional example part 2
In the second part of the example eigenvalue and eigenvector are calculated. First, the characteristic polynomial is determined.
The zeros of the characteristic polynomial are the eigenvalues of A.
So the eigenvalue of A is:
The solutions of the characteristic equation system provide the eigenvectors.
That results in the following two equations.
That means all vectors vi where both components are equal, are eigenvectors to eigenvalue λi = 2.
Calculator for the calculation of the characteristic polynomial p(λ) of matrix A
Calculation according to the algorithm of Faddejew-Leverrier.
B0= 0; cn= 1;
repeat
Bk= A Bk-1 + cn-k+1 I; cn-k= - tr(A Bk) / k;
until k < Rang(A)